6.8 KiB
SOFTWARE ENGINEERING DEPARTMENT
SITUATION REPORT 3
Implementing a Parachute Launching System using Pixhawk
Luís Jesus
October, 2022
Summary
With this report, I want to introduce a way to implement our Parachute Recovery System that will guarantee that the rocket lands on the ground successfully. This implementation was suggested by Professor Anuj Regmi (SYSTEC). Even though there are not rocketry implementations of its suggestion (besides BPS.space) in which we can rely on, it is relevant to search how it could be done and some of its constraints.
As concluded in the previous meeting, designing our own board computer "from scratch" is actually very risky and may lead to difficult challenges that we may not be able to solve "in-time", which means that we must choose a more reliable path, at least for now. The suggestion was to use a Pixhawk Autopilot Board - Pixhawk [full specifications' sheet here] - and ArduPilot as the controller/receiver of this board (it is tipically the software used along with Pixhawk).
If we move on to this solution, that means that a great part of the plan made by the Electrical Engineering Department will have to be discarded, as Pixhawk4 has in-built sensors and they won't have to face the expected assembly and testing procedure that was initially designed.
Introduction
Ardupilot is a open source autopilot system that supports many vehicle types, such as multi-copters, traditional helicopters, fixed wing aircraft, etc. However, there is not much information about its implementation in rockets, and the only example we have is BPS.SPACE, from which we don't have many information.
Considering this, we know that this implementation would need some adjustments to fit in the rocketry field.
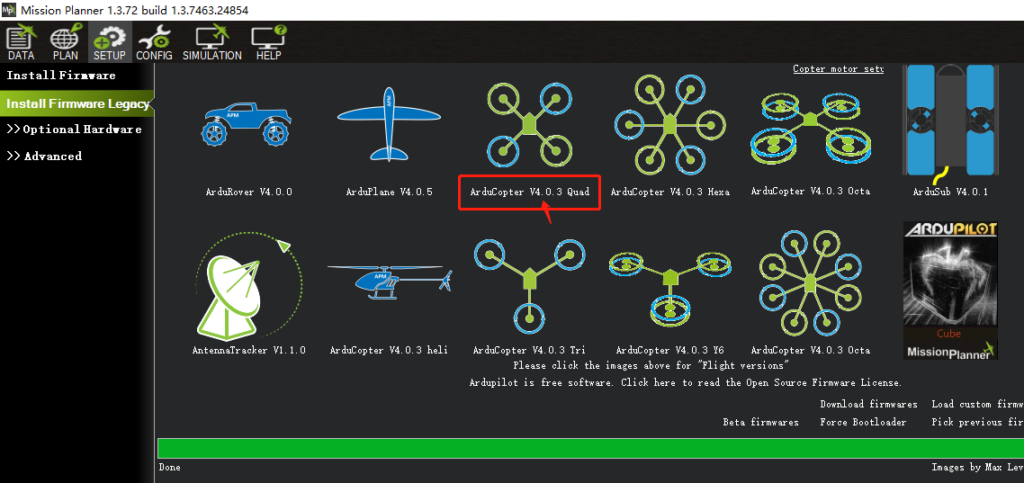
Mission Planner is part of ArduPilot and it has the interface that allows us to follow the vehicle during its flight. However, if we look to the picture bellow, we can also see that there is not compatibility with a rocket-type vehicle. A amateur SpaceX inspired rocket (see here) actually implemented Pixhawk running with ArduPilot V4.0.4 configured as a single-copter, however, the mentioned project is very different. It's not a real rocket; it "flies" like a drone, it does not reach high altitude, it is remote controlled, etc. The analysis about the requirements to make a Pixhawk based board fit a rocket model is in charge of our team member João Gil, though.
Considering this, there is not information about parachute deployment using Pixhawk + Ardupilot on rocketry, but we can see a more "typical" case (for example, how it is used in drones).
Parachute Deployment System
As a baseline requirement to implement this, we have, of course, a complete parachute mechanism like SkyCat or CAD Drones but adapted, in this case, to fit our own vehicle that is way larger than the vehicles Ardupilot is meant for. This study is certainly under the analysis of another department, as it is not related to software.
The release of the parachute is actually a mechanical "phenomenon" and that made the interpretation of the documentation a little bit hard. Maybe we need the help of a member of the Electrical and Mechanical Departments to help us understanding what is actually happening during the deployment of the parachute.
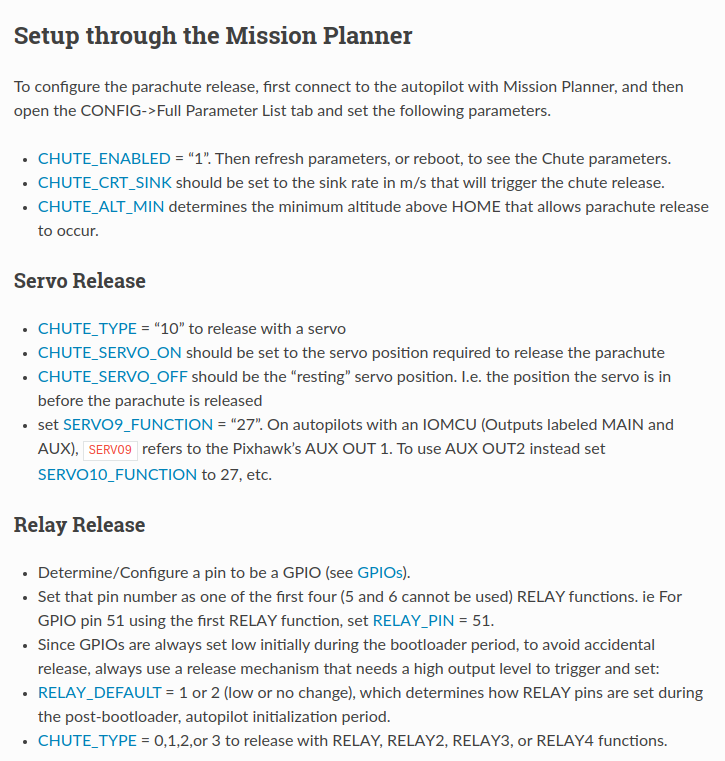
The parachute release mechanism can be triggered from either a Relay or a PWM (Pulse-width modulation) signal. If a Relay pin is used, the parachute release has to be activated on a high level and RELAY_DEFAULT has to be OFF or No Change, in order to avoid triggering the release during initialization. For more information about this and other parameters, see Complete Parameter List (we need the help of other departments to better understand them).
We may want the parachute to deploy automatically or manually, but in our case, it's just going to be automatic because the Ground Station is not sending any kind of signals/data/information to the rocket, it will only work as a receiver.
In the official documentation of ArduPilot, it is referred that the configuration is made via Mission Planner and we have a bunch of parameters to deal with according to our needs and specificities. There is some information about the PINs configuration, however, I did not understand how our rocket is in terms of mechanical components in order to make a detailed report about the implementation of this functionality. Considering this noticeable trouble on understanding other technical information in the documentation, we may need to establish a very close relationship with other departments because there are many subjects crossing our theoretical implementation. This terms and configurations are important to discuss with other departments:
Apart from this, there is a project called ArduRocket that seems to be a modified version of ArduPilot but it is quite old (check GitHub repository).
Veredict
There is basically no information about Pixhawk + Ardupilot usage in rocketry, but only about their typical implementations in other vehicles. This means that there is a need to study the best way to make this type of implementation compatible.
For this, it seems that the help and monitoring of other departments (Electrical and/or Mechanical ?) is crucial to understand the viability of the implementation. Invictus is being designed to reach an apogee of 3000 meters and it uses hybrid-propulsion; it seems quite complex when compared to those simple vehicles supported by ArduPilot which means that there is a big analysis of viability to be made by a competent department before any kind of analysis of implementation.
Apart from this, if the transposition of this technology to our rocket is achievable and viable, there is the official documentation mentioned in this report about the setup of the parachute deployment system, that has to be analyzed carefully not only by our department, but fundamentally with the help of the Mechanical Engineering Department and Electrical Engineering Department.
References
12Forum](https://diydrones.com/forum/topics/ardurocket?xg_source=activity);
3repository](https://github.com/stew-lilley/ArduRocket);
4