5.4 KiB
SITUATION REPORT 2 (03/09/2022)
Comparison between different TRS Receiver Systems
Introduction
The aim of this report is to analyze and compare existing Total Recovery Systems (TRS), in order to know the requirements of such a system and help us taking important technical decisions, such as the software's architecture and tech stack.
Unfortunately, I wasn't able to find many projects with source code that fitted exactly our own. However, I've narrowed it down to 3 that are very similar, namely:
- Rocket Tracker 1 - Model Rocket tracking system
- White Vest Model Rocket 2 - A more complete model rocket tracking system
- Vehicle Tracking System 3 - Vehicle tracking system
Since there isn't a decision yet made regarding the radio transceiver that will be used, I've included examples with both LoRa and XBee modules.
1 - Rocket Tracker
This tracking system objective is to find a model rocket via GPS and display its location in a map, via a client app. To have an idea of the structure and the relationship between its components, I've made the following simplified diagram:
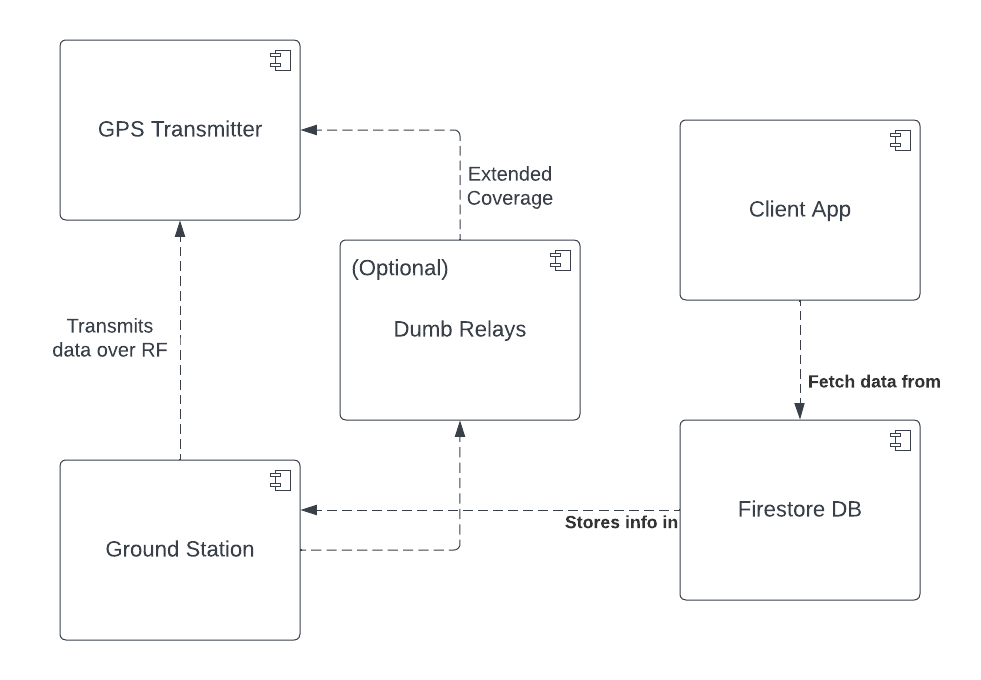 Please note that the arrows in the diagram represent a dependency association.
Please note that the arrows in the diagram represent a dependency association.
Since this report's main focus is on the receiver system, I will not give many details about the transmitter. Anyhow, it is important to know that the radio system is an XBee radio in both the sender and receiver. Furthermore, the transmission packets are 9-byte packets made up of a status byte, then 4 bytes for latitude, and 4 bytes for longitude. Thus, it's important to note that this tracking system does not send as much data as we seek.
Regarding the Tech Stack, the GPS transmitter is in C++ (Arduino), the Ground Station is a nodeJS app, and the client app is in JavaScript. All the communication with the XBee radio is made through serialport and, for that, the libraries serialport and xbee-api were used by the ground station to help set up the radio's config and receive data.
Lastly, the ground station has an event-driven architecture, based on events from the above mentioned libraries, such as the opening of the serialport to setup the XBee device, and the reception of new messages. This data is then parsed and sent to the Firestore DB which will then be accessed by the Client App.
2 - White Vest Model Rocket
Project for collecting, logging, emitting, and visualizing telemetry data from a model rocket containing an inboard Raspberry Pi Zero with an Arduino receiving telemetry. As opposed to the previous example, this one uses a LoRa radio transceiver.
This system is more detailed and contains better documentation, which can be seen in the references [2] and [3]. The software architecture is presented below:
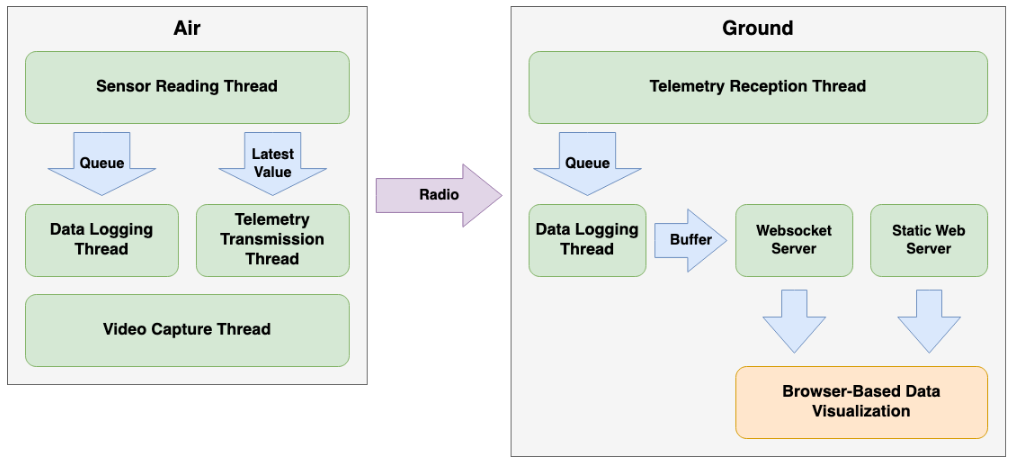
Air Program
In the Sensor Reading Thread, 2 devices are accessed, the BMP388 and LSM303. To fetch the value of pressure, temperature, acceleration, and magnetic orientation. These values are added to a thread-safe queue and a thread-safe single value holder. This thread can capture about 4 sets of sensor readings per second (the BMP388 reads out data quite slowly).
A separate thread reads the thread-safe queue and logs that data to a CSV file on the device. Further, an additional thread reads that thread-safe single value and transmits that data via the LoRa transceiver as floats packed into a byte array (only the most recently read data is transmitted rather than everything from the queue to have near-real-time data).
Ground Program
On the ground, the LoRa transceiver receives those byte arrays, unpacks them to floats, and puts the data into a thread-safe queue. Another thread reads from that queue, logs that data to a CSV file, and appends the data to a thread-safe data buffer.
A 3rd thread acts as a webserver to serve the dashboard web app, and a final thread listens for WebSocket connections to stream the contents of the data buffer as data becomes available.
Tech Stack
- Transmitter - Python
- Ground Station - Go (handle telemetry data), Javascript(frontend) & Arduino(Configure the LoRa transceiver)
Relevant Libraries
For python, the adafruit_rfm9x library provides an interface that allows sending/receiving bytes of data in long range LoRa mode.
For the arduino, the RH_RF95.h library provides a driver to send/receive unaddressed, unreliable datagram via a LoRa transceiver. This library helps to change the transceiver configuration and to receive data from it. Furthermore, Serial is frequently used for the communication between the arduino board and the computer.
3 - Vehicle Tracking System
TODO
References
12345